Meta開源四個Oculus-Samples示例庫
涉及資源加載、空間共享、手部追蹤
Meta日前在GitHub發布了公開的oculus-samples儲存庫,從而向社區開放一系列的開源示例。團隊表示,目標是分享探索VR媒介過程中的構思和實踐,并幫助大家將有用的功能集成到自己的項目中或鼓勵啟發行業創新。
目前oculus-samples儲存庫共提供四個示例:
如何做到行業領先的VR手柄定位技術
自去年年底YVR1發布以來,玩出夢想集團公布了產品的多項規格參數和技術性能指標。其中就包括定位追蹤技術相關。定位追蹤效果是目前衡量VR產品好壞的最核心技術表現之一。對此,YVR團隊一直不斷探索其精度和穩定性,致力于能為用戶帶來一個更好的定位追蹤系統。基于產品手柄定位追蹤準確的角度,YVR從算法及軟件方向給予了深度探討。
YVR1的手柄使用了基于紅外光的主動式光學定位追蹤方案,主要是通過頭顯的攝像頭在短曝光圖像上觀測到手柄上紅外光電發射的紅外光,通過檢測光點并根據多視圖幾何原理計算初步的位姿,然后融合產生于手柄IMU(Inertial Measurement Unit)的關鍵數據對手柄進行的定位跟蹤。該方案無需像電磁定位或者超聲波定位那樣需要專門的傳感器模組,具有低成本,低功耗的優勢。同時不直接受家庭用戶常見的空氣擾動,復雜電磁環境的干擾,可以提供極高的定位精度,日益成為消費級VR產品手柄定位方案的首選。
1. 定位跟蹤框架
微軟研發MR+機器人框架
基于HoloLens實現機器人操控交互
在過去的數十年間,工程師不斷為我們帶來功能和性能越來越先進的技術,比方說“空間計算”。
空間計算是指計算機、機器人和其他電子設備“感知”周圍環境并創建其數字表示的能力,而混合現實等尖端技術可以顯著增強空間計算,并幫助創建復雜的傳感和測繪系統。
日前,微軟混合現實與人工智能實驗室(Microsoft Mixed Reality and AI Lab)和蘇黎世理工學院的研究人員提出了一種將混合現實和機器人技術結合起來,以增強空間計算應用的框架。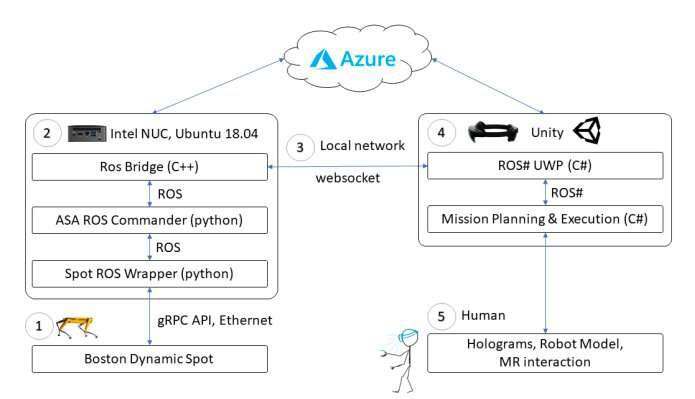

003
仿生機器魚 本軟件通過藍牙與仿生機器魚建立連接,進而控制仿生魚的前進、左右轉,以及加減速。 本軟件需與藍牙版仿生魚配套。 打開軟件后會進入操控界面,點擊右上角的搜索按鈕,可進入搜索界面,會自動搜索顯示附近的仿生機器魚設備,選擇想要連接的仿生魚,建立連接后會自動跳轉到操控界面,之后便可通過按鈕控制魚游動的方向,通過加減速按鈕控制魚游動的速度。 為方便不同用戶體驗,本軟件支持重力感應及按鈕控制,同時支持用戶自定義按鈕位置,并提供編程功能使得用戶可自定義仿生魚的游動方式。 因本軟件采用藍牙4.0控制仿生機器魚,故需安卓版本在4.3及其以上。
???


智能機械魚安卓版app下載與使用說明
仿生機器魚 本軟件通過藍牙與仿生機器魚建立連接,進而控制仿生魚的前進、左右轉,以及加減速。 本軟件需與藍牙版仿生魚配套。 打開軟件后會進入操控界面,點擊右上角的搜索按鈕,可進入搜索界面,會自動搜索顯示附近的仿生機器魚設備,選擇想要連接的仿生魚,建立連接后會自動跳轉到操控界面,之后便可通過按鈕控制魚游動的方向,通過加減速按鈕控制魚游動的速度。 為方便不同用戶體驗,本軟件支持重力感應及按鈕控制,同時支持用戶自定義按鈕位置,并提供編程功能使得用戶可自定義仿生魚的游動方式。 因本軟件采用藍牙4.0控制仿生機器魚,故需安卓版本在4.3及其以上。
???
技嘉發布親的物聯網迷你PC:Brix

迷你pc的選擇范圍越來越大了,著名主板品牌技術近期發布了新的物聯網迷你pc:Brix,基于intel i3打造,Kaby Lake 核顯可帶動 4K(3840×2160)@ 60Hz,較 Apollo Lake 核顯的 4K @ 30Hz 有所提升。
外設連接性方面,EKi3A-7100 機型提供了一對 USB 3.0 + 一個 USB 3.1 Type-A 端口(以及一個 USB 3.1 Type-C 連接器)。
網絡方面均由英特爾控制器提供,包括千兆以太網、802.11ac Wi-Fi、藍牙 4.2,此外它還預留了 9 針的串行 UART 連接頭。
雖然技嘉提供了 19V / 65W 的電源適配器,但這款酷睿版本的 Brix IoT PC 其實也支持 12~19V 電壓輸入。
英特爾Compute Card:信用卡大小的電腦

硬件開發人員并不需要為獨立組件部署設計,只需要使用特殊的插槽來容納Compute Card。這個卡片尺寸為94.5*55*5mm,并不會占用太大的空間,可以通過USB Type-C端口來連接設備。